Types Of Hardware Used For Mechanized Trading
The hardware, typically used for mechanized trading in conjunction with systems like Immediate Peak, can significantly impact performance and execution speed. Here are some … Read more →
The hardware, typically used for mechanized trading in conjunction with systems like Immediate Peak, can significantly impact performance and execution speed. Here are some … Read more →

When fuel is supplied to an engine for combustion then the heat generated increases the engine temperature. It has been observed that the properties … Read more →

In the realm of materials engineering, grey cast iron takes the spotlight for its exceptional properties, attributed to its carefully designed composition. Grey cast … Read more →
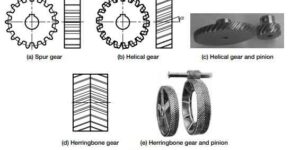
Belts and pulleys transmit power with some slippage. If this slippage cannot be tolerated, gears are used. In this article, we will discuss the … Read more →
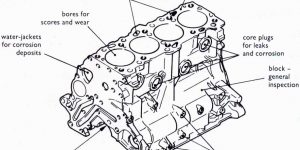
The reliability of an automobile engine depends on the proper construction of the engine components. The constructional details depend on the stresses and the function of … Read more →
In this article, you’ll learn in details that what is anti lock braking system? Components of anti-lock braking system and its types. Anti Lock … Read more →